Supply Chains
SC1 – Smart Connected Shared Mobility for Urban Area

Development of smart edge- and cloud-based building bricks for autonomous mobility interconnected with secure communication architectures and systems.
Objectives: 1,2,6
Innovation
- Secure Edge/Cloud data utilization
- Event based fleet learning
- Smart city routing
Partner: VIF, AIT, AVL, OTH, TUGRAZ, TTTAUTO, IFAG, VGTU
Demonstrators
SCD 1.1: Lessons-learned based (critical scenario) update of ADAS/AD Controller (lead: AVL)
SCD 1.2: Robo-taxi (lead: ViF)
SCD 1.3: Virtual city routing (lead: OTH)
SC2 – EV 2030 by AI inside
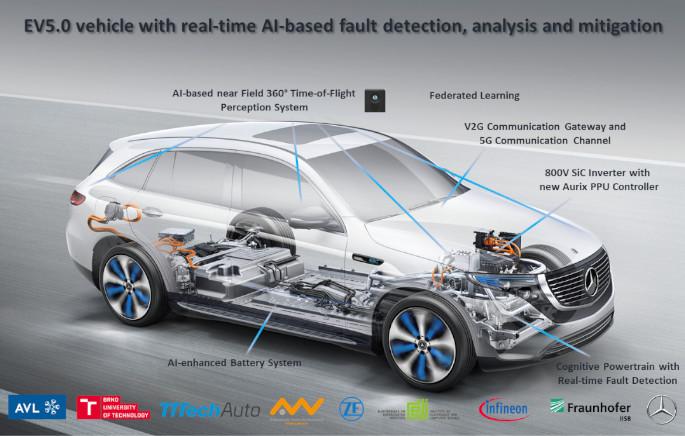
Builds an electrical passenger car (EV) to demonstrate AI based fault- detection, analysis, mitigation for the powertrain in real time operation.
Objectives: 1,2,3,4,5
Innovation
- AI based fault- detection, analysis, mitigation for the powertrain in real time operation
- System architecture with reduced redundancy
Partners: MBAG, AVL, BUT, EDI, FHG, IFAG, IFIN, OTH, TTTAuto, ZF
Demonstrators:
SCD 2.1: EV5.0 vehicle with real-time AI-based fault detection, analysis and mitigation (lead: MBAG)
SC3 – Functional integrated highly automated L3 driving
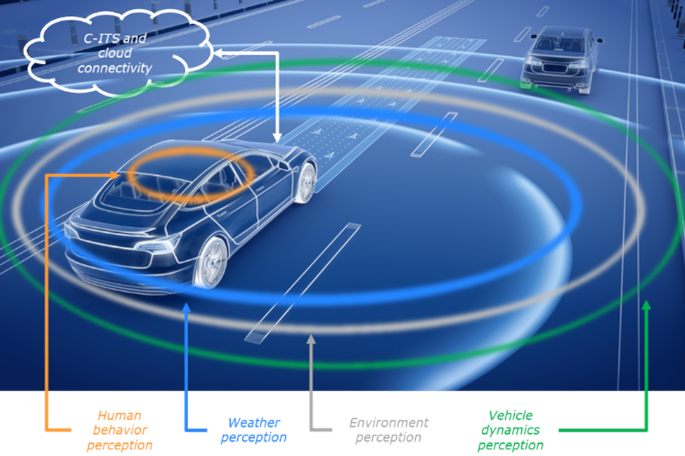
Is focused on coexisting-human operated vehicles and autonomous systems, and the dynamic interaction between them.
Objectives: 2,3,5
Innovation:
- Human feedback loop “Behavioral Planning”
- Multi-Modal mobility
- Weather-in-the-loop
Partners: I&M, IFAG, IFAT, IFI, VEM, WV, SAT, POLITO, UNITO, UNIMORE, BYLO, FEDDZ
Demonstrators:
SCD 3.1: Demo vehicle to demonstrate L3 automated with a Driver’s Monitoring System (lead: UNIMORE)
SCD 3.2: L1e vehicle with natively integrated telematics (lead: FEDDZ)
SC4 – Robust Propulsion System for Shared Connected Mobility
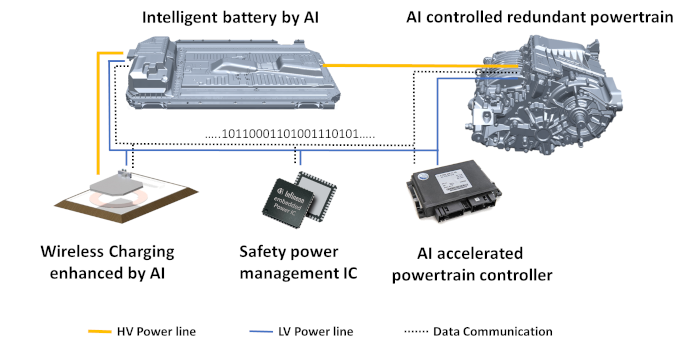
Research and demonstrate a powertrain for xEVs including inverter with AI - based health assessment. AI techniques will be used for AI-based functionalities for the battery management as well as detection of foreign objects by wireless chargers.
Objectives: 1,2,3
Innovation:
- AI in monitor
- AI for control
- GaN for Inverter
Partners: ZF, BUT, FHG (IISB), HSO, IFAG, IFAT, IFI, INNAT, MBAG, TUD, TUDO, TUWIEN
Demonstrators:
SCD 4.1: AI controlled redundant powertrain (lead: ZF)
SCD 4.2: AI accelerated powertrain control (lead: IFAG)
SCD 4.3: Intelligent battery by AI (lead: FHG)
SCD 4.4: Safety power management IC (lead: IFI) SCD 4.5: Wireless Charging Enhanced by AI (lead: TUD)
SC5 – Connectivity and Cognitive Communication
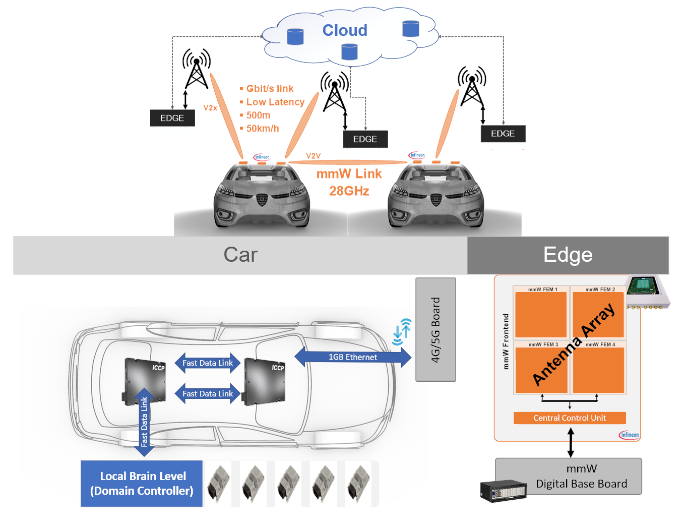
Research and demonstration on secure external communication, with high data rates (5G) and bandwidth. The cloud fusion of edge perception results into the digital twin as well as fast and reliable wireless communication channels based on 28 GHz mmW technology
Objectives: 2,6
Innovation:
- Communication System Architecture
- Robust low latency technology
- AI-enabling communication tech.
Partners: TTTAUTO, AIT, IFAG, NXP-NL, NXP-DE, IMA, FHG (HHI), TUD
Demonstrators:
SCD 5.1: Proof-of-concept communication platform (lead: TTTAuto)
SCD 5.2: Proof-of-concept demonstrator novel wireless data transmission (edge/cloud) (lead: IFAG)
SC6 – AI-Enabled Perception and Sensor Fusion Platforms
Research and demonstration on AI based perception and sensor fusion, new scalable AI-enabled platforms for autonomous mobility interconnected with secure communication architectures and systems.
Objectives: 1,2,3,4,5,6
Innovation:
- Sensor network fusion
- AI enabled perception
Partners: SINTEF, BUT, EDI, IFAG, IFAT, IFI, IFIN, IMA, IMEC, INNAT, NXPN, NXPDE, NXT, PAXSTER, TGLV, TUDELFT
Demonstrators:
SCD 6.1: Perception and vehicle intelligence platform (lead: NXPN)
SCD 6.2: Neuromorphic sensor fusion (lead: IMEC)
SCD 6.3: Affordable AI-enabled perception (lead: SINTEF)
SCD 6.4: Localisation and 3D mapping (lead: BUT)
SCD 6.5: 3D Time of Flight with Aurix PPU (lead: IFAG)
SC7 – AI-Based Methods, Simulation and Virtualization
Research and demonstration for methods, tools and processes for a trustable AI-based connected shared mobility with focus of trustworthiness, simulation and virtualization.
Objectives: 3, 5, 6
Innovation:
- Automated cloud based learning and scenario generation
- Standardized data exchange for digital twins
Partners: AIDG, AIT, AVL, DIGITH, TTTAUTO, TUG-IST
Demonstrators:
SCD 7.1: Enriched virtual models based on standardized real-world data (lead: AVL)
SCD 7.2: Virtualized time and latency critical AI processes on the in-car computing platform (lead: TTTech)
SCD 7.3: AI based simulation and virtualization for multimodal mobility for virtual Smart Cities (lead: AIDG)
SC8 – Impact Green Deal, Standardization, Certification, Ethical Aspects
Implementing Europe’s vision of climate neutrality by 2050 for the automotive and the semi-conductor sector. Furthermore it makes sure that the developments within AI4CSM are conform with current and upcoming standards as well as to support their activates in driving new AI related knowledge into the standards.
Objectives: 1, 2, 3, 4, 5, 6
Innovation:
- As of SC1 to SC7
- Green Deal
Partners: AIT, IFAG, I&M, MBAG, TTTAUTO, IEDMS, SINTEF, VIF, TUD, TG
Demonstrators:
SCD 8.1: Green Deal (AIT & TUD, all)
SCD 8.2: Standards (AIT, all)
Dissemination
AI4CSM Project Presentation
AI4CSM Leaflet
AI4CSM SC1@EFECS
AI4CSM SC2@EFECS
AI4CSM SC8@EFECS
AI4CSM ViF@EFECS
AI4CSM Poster
Related Projects
3ccar
Description
ECSEL JU Project. Integrated Components for Complexity Control in affordable electrified vehicle.
AI4CSM Novelty
AI4CSM partners will explore the benefit from the advances in the automotive sector in relation to 3CCar results for
- Comfort and Usability
- Robustness and Reliability
- Thermally controlled battery
- Cost efficient thermal system design
An attention will be posed also on standardization and certification issues, integrating the latest AI4CSM advances in next generation EV vehicles.
Difference
Was focused on the hardware architecture of EVs with SAE level 2-3 capabilities with limited connectivity. AI, 5G, fleet based learning were not included.
AI4DI
Description
The ECSEL JU, grant agreement n° 826060, project AI4DI started in May 2019, developing AI methods and tools for the Digital Industry.
AI4CSM Novelty
AI4CSM plans to benefit from the preliminary work within AI4DI in the areas of tools and methods for artificial intelligence. A liaison with AI4DI will be further explored. AI4CSM will leverage the know how of the AI4DI system level design of AI-based industrial implementations researched, that provides a high-level reference hybrid system architecture. AI4CSM will go further in implementing innovative vehicles architectures that will address functional complexity with many diverse cross-domain functionalities.
Difference
Focuses on AI implementation away from the cloud towards the edge but not for automotive applications. Thus no fleet based learning.
Secredas
Description
SECREDAS is an ECSEL JU project starting in May 2018, focusing on security for cross-domain reliable dependable automated systems
AI4CSM Novelty
AI4CSM will re-use the SECREDAS security library elements and security framework, and apply this to the architectures and components under development within AI4CSM. This will lead to future requirements and enhancements of the security library elements, especially with AI-related integration.
Difference
Is not focussing on powertrain, Edge/cloud integration, digital twins etc. all of which is necessary for a system and system of system optimization.
Prystine
Description
The ECSEL JU project PRYSTINE started in May 2018. PRYSTINE studies fail operational approaches related to autonomous driving (mostly ADAS-related applications)
AI4CSM Novelty
PRYSTINE will serve as an input to AI4CSM so as to widen the solutions towards AI-enabled perception and control of highly automated vehicles, not only for the automotive domain. Moreover, PRYSTINE findings will be exploited so as to more appropriately structure the holistic virtual platforms for next generation AI-on-chip solutions.
Difference
Is deeply related to data fusion not a system of sytem approach with cloud/edge integration, secure communication as well as powertrain components.
New Control
Description
NewControl is an ECSEL JU project starting in Summer 2019, focusing on cognitive perception and control of highly automated vehicles.
AI4CSM Novelty
AI4CSM will benefit from the work within NewControl in the areas of cognitive perception, so as to pave the way for next generation cognitive decision making.
Difference
Basically covers the topics of SC6, not covering a system of system approach. AI4CSM will continue and broaden in this regard.
Autodrive
Description
The ECSEL JU project AUTODRIVE, which started in June 2017,pursues basic research and development in the field of environmental perception technologies with a particular focus on optical Vehicle2X communication.
AI4CSM Novelty
AI4CSM will further leverage the know how developed by AUTODRIVE concerning future vehicle requirements: electrified, connected, autonomous (ECA). ECA vehicles’ mission critical applications must have connectivity to function also in abnormal situations. Connected vehicles systems must act fail-operational, fail-safe, reaching a level of redundancy mechanism that guarantee full control at any critical situation. The different vehicle’s functional layers have to be designed to approach technologies and applications in structural manner. Highest Efficiency for design & cost.
Difference
AI based learing, AI focused sensing and object recognition, AI optimized control plattforms, GaN inverters were not part of the project
Architect ECA2030
Description
Enabling mission oriented validation of electronic components and systems (ECS) for electric, connected and automated vehicles to improve reliability, robustness, safety and traceability
AI4CSM Novelty
AI4CSM will contribute together with Architect ECA2030 to further vehicle electrification. Failure of systems-on-chip, electronic components and hardware deficiencies, deficiencies in sensing road, traffic, and environmental conditions, degraded system performance are all researches that will leverage the know how needed for AI4CSM research.
Difference
Is focused on the requirements for the homologation no technical developments on the domains of a vehicle.
1000kmplus
Description
The ECSEL JU project AUTODRIVE, which started in June 2017,pursues basic research and development in the field of environmental perception technologies with a particular focus on optical Vehicle2X communication.
AI4CSM Novelty
AI4CSM will further leverage the know how developed by AUTODRIVE concerning future vehicle requirements: electrified, connected, autonomous (ECA). ECA vehicles’ mission critical applications must have connectivity to function also in abnormal situations. Connected vehicles systems must act fail-operational, fail-safe, reaching a level of redundancy mechanism that guarantee full control at any critical situation. The different vehicle’s functional layers have to be designed to approach technologies and applications in structural manner. Highest Efficiency for design & cost.
Difference
AI based learing, AI focused sensing and object recognition, AI optimized control plattforms, GaN inverters were not part of the project